कार्यक्रमाचा आढावा
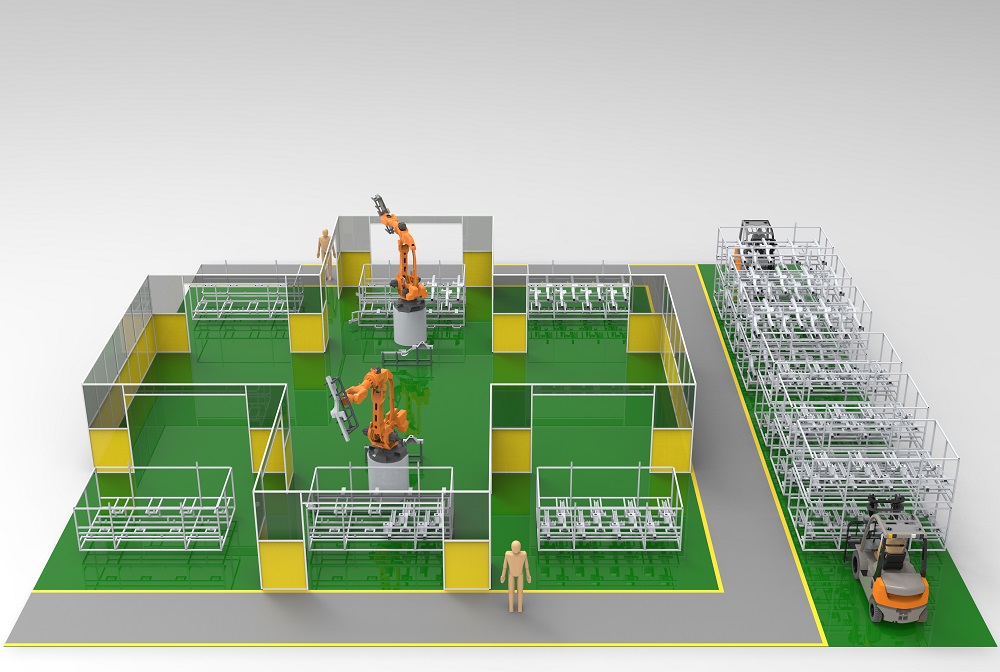
उत्पादन लाइनचे मुख्य कार्य: वाहनाच्या पुढील रेल क्रॅशवर्थिनेस आणि व्हील केसिंग असेंब्ली उत्पादन लाइन.
असेंब्ली प्रक्रिया: पार्ट कारला पोझिशनवर आणा आणि चाचणी करा——रोबोट पार्ट ठेवतो——HY1165A-290 पार्ट घेऊन पार्ट कारमध्ये ठेवतो——पार्किंगची जागा भरल्यावर, कर्मचाऱ्यांना पार्ट बदलण्यास सांगा.
या प्रकल्पात HY1165A-290 चे 2 संच, पार्किंग स्पेसचे 2 संच, ग्रिपचे 2 संच आणि इतर संस्थांचा समावेश आहे.
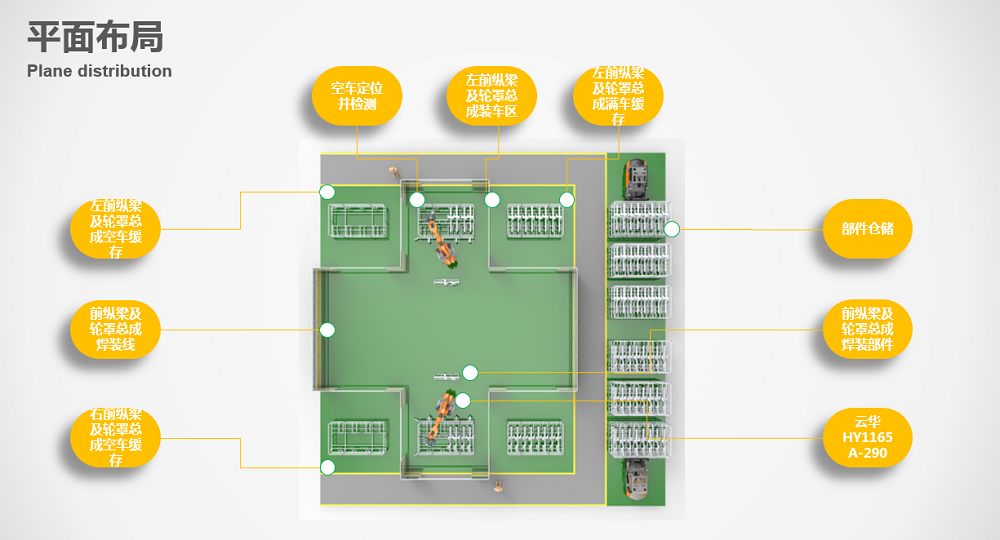
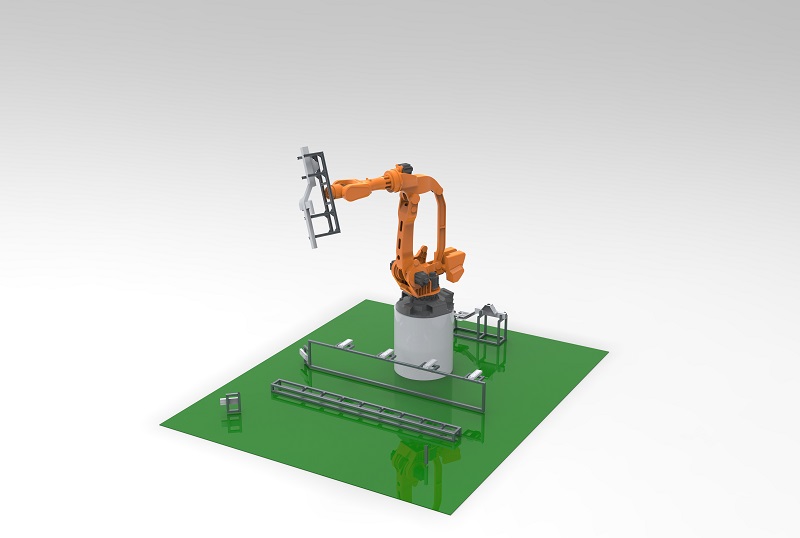
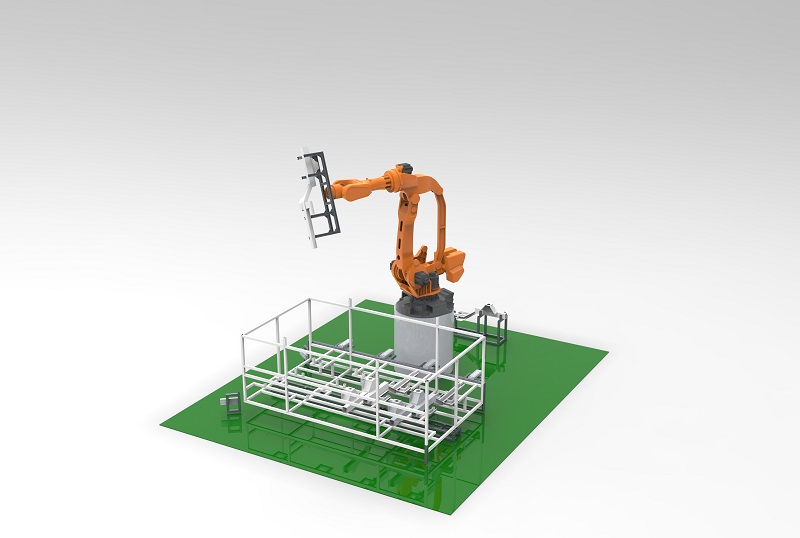
वर्कस्टेशन सुरक्षा संरक्षण, घटक प्लेसमेंट प्रभावीपणा शोधणे, ग्रास प्रभावीपणा शोधणे, रिकाम्या पार्किंग जागेचा शोध घेणे.
घटक कारची स्थिती आणि शोध, घटक कार दुसऱ्या मजल्यावरील सामग्री रॅक नियंत्रण, रिकामे आणि पूर्ण कार नियंत्रण.



